



Description
NEW – Now with protective case (unsoldered).
Level up your FRC robot using LaserCAN, a multi-use laser rangefinding sensor in a postage stamp form factor. No more finnicky beam-breaks, limit switches, or ultrasonic sensors – just the power of lasers.
Use Cases:
- Rangefinding and Obstacle Avoidance
- Gamepiece / Object Presence and Range Detection
- Absolute Elevator Height Detection
- Contactless Limit Switch
Key Features
- FRC-Ready!
- Completely Open-Source
- 0-4000mm range (in IR-darkness)
- Small (25x25mm, < 1inx1in) form-factor
- Adjustable Region of Interest (RoI) and Field of View (FoV)
- Configurable from robot code or from GrappleHook
- Persistent configuration storage
- Ambient light measurement
- Adjustable 10-50Hz sample rate
- CAN2.0/B compatible (FRC CAN messaging compliant)
- Input voltage range 4.5V – 16V
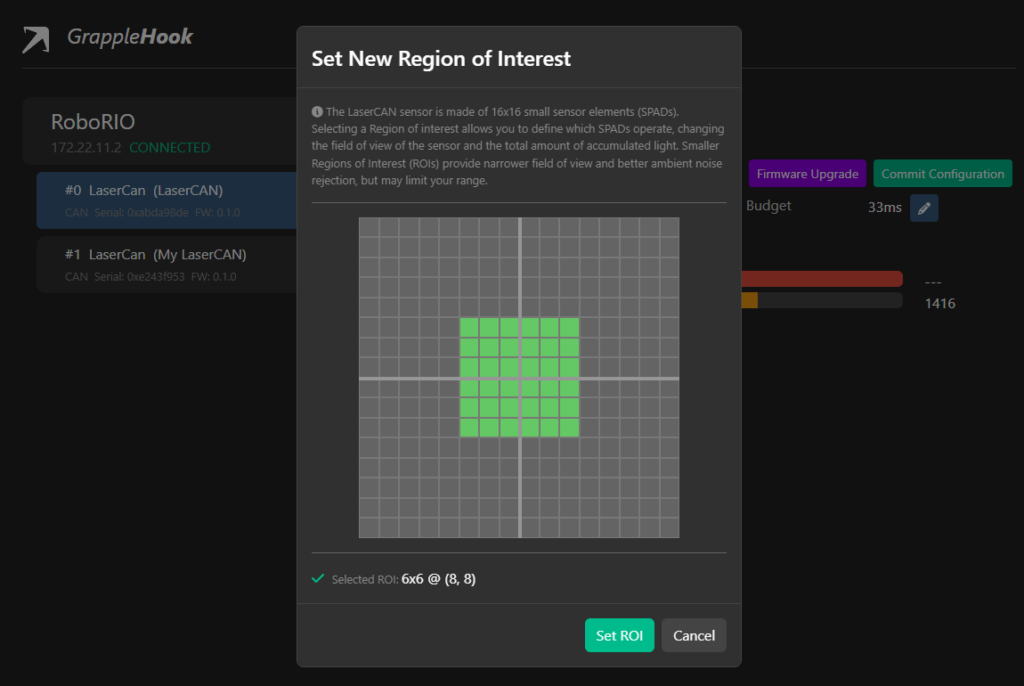
Tune to your requirements
The LaserCAN uses the VL53L1X Class-1 940nm laser ranging sensor, and exposes configuration of the 16×16 SPAD array, allowing you to target your region of interest (ROI) to suit your needs. Use a small ROI for detecting the height of your elevator, or a wide ROI for detecting gamepieces. Adjust your ranging mode (short vs long) to tune distance vs ambient light rejection, and adjust your timing budget to tune accuracy vs measurement frequency. No matter your use case, LaserCAN will get it done.
CAN and VBus Pass-through
Running multiple LaserCANs? Daisy-chain up to 8* to reduce wiring run headaches!**
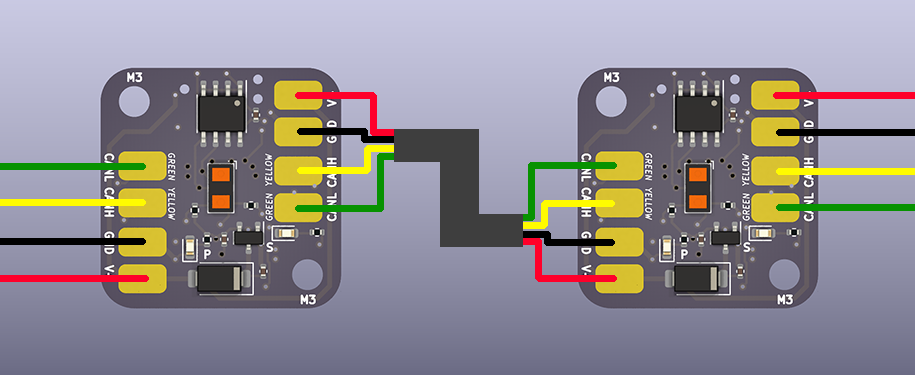
* Limited to 8 due to current capacity of internal traces. CANH and CANL can be daisychained beyond 8 devices if new power is provided. DO NOT daisychain non-LaserCAN devices if using the same power – daisychaining only works because the power draw is so small!
** CAN (yellow + green) wiring runs must terminate either at the PDP/PDH, or with a 120 ohm termination resistor between CANH and CANL.
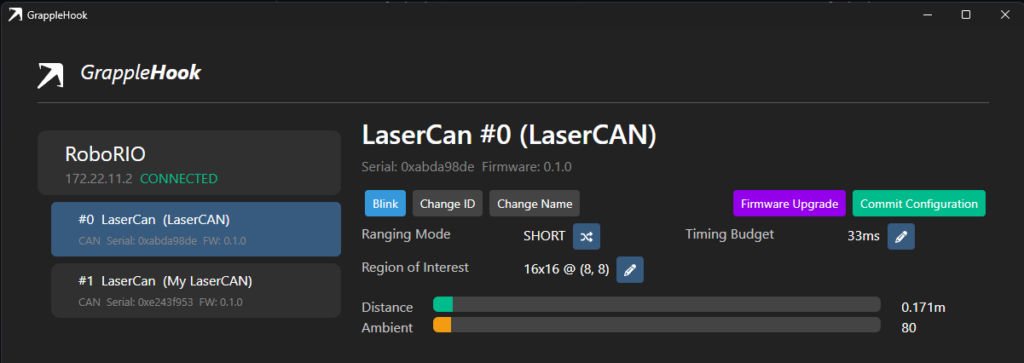
Configure with GrappleHook
LaserCAN comes with support for GrappleHook – our companion application allowing you to configure your Grapple devices. Adjust your Region of Interest, Timing Budget, Ranging Mode, and CAN ID with GrappleHook. Update your firmware, monitor sensor status, and more!
Easy to Integrate into FRC Code
From the same people that bought you GradleRIO and Pathfinder, libgrapplefrc provides an intuitive and easy-to-use library for your FRC Robot to interface with the LaserCAN. So simple we can put the instructions right in the product page!
- Install the Vendor Dep. In VSCode, hit CTRL+SHIFT+P and select “WPILib: Manage Vendor Libraries”. Select “Install new libraries (online)” and paste the following URL: https://storage.googleapis.com/grapple-frc-maven/libgrapplefrc2025.json
- Use it! Have a look at our examples


